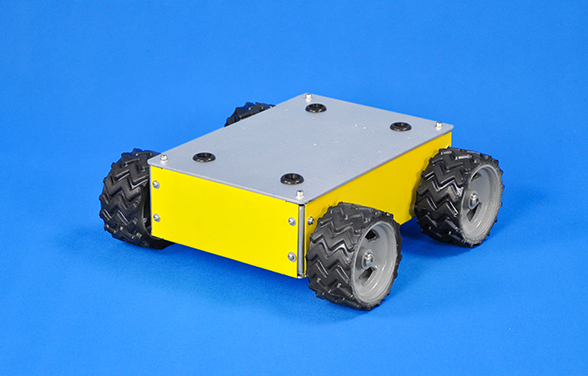
Discovery C2 四輪差動平臺

產品簡介
圖紙下載 | Discovery C2視頻展示
產品特性
- 四輪獨立驅動
- 輪系帶軸承座設計
- 工業級橡膠輪胎
- 空心杯直流伺服電機
- 伺服驅動器
- DEMO開發板及應用代碼
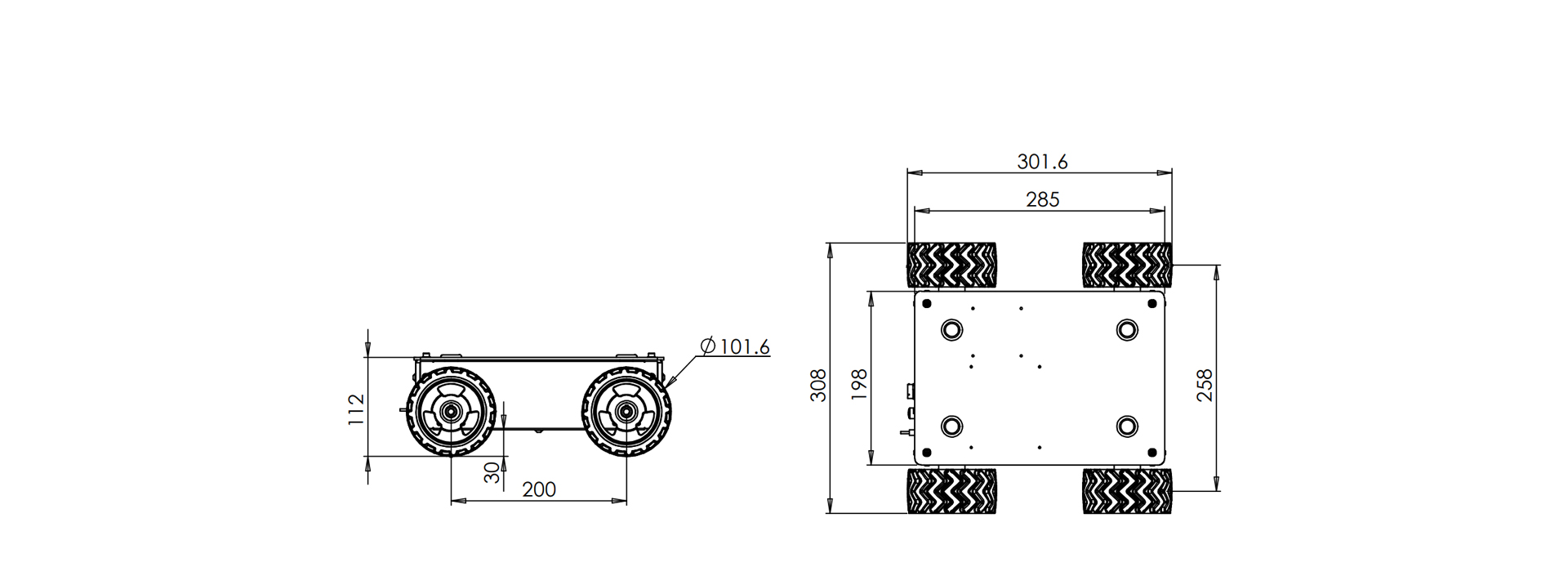
外形尺寸
規格參數
| 機身形式 | 鈑金組合成型 | 外形尺寸 | 301.6×308×112 |
| 驅動輪 | HSL-10橡膠輪 | 驅動輪直徑 | 101.6mm |
| 驅動方式 | 四輪獨立驅動 | 懸掛形式 | 無懸掛 |
| 車身最小離地間隙 | 30mm | 整機重量 | 5.6kg |
| 額定負載能力 | 15kg | 電機類型 | 空心杯直流伺服電機 |
| 電機額定功率 | 17W | 電機編碼器 | 12線/轉,A、B相輸出 |
| 電機數量 | 4 | 電機驅動 | 伺服驅動器,CAN總線、RS232通信接口 |
| 最大移動速度 | 0.65m/s | 最大自轉速度 | 160°/s |
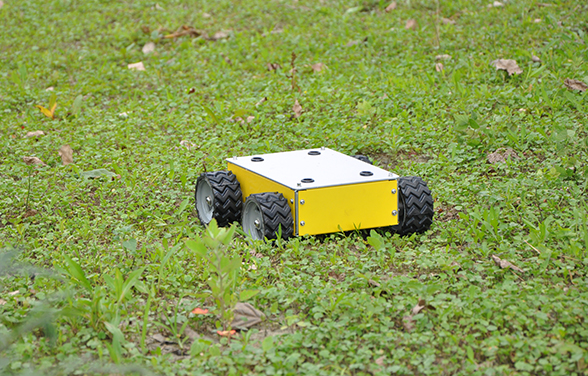
| 最小轉彎半徑 | 0m | 適應的地形 | 室內、室外普通路面及泥濘路面 |
| 典型續航時間 | 約8h(負載5kg,運行速度0.5m/s,運行率70%) | 待機時間 | >30h |
| 車載電源輸出 | 5V@2.5A×2路 /電池電壓(9.6~12.6V)@>5A | 電源保險管預設規格 | 5×20/10A |
| 電池 | 12V/10.4Ah鋰離子電池 | 電池快速更換 | 支持 |
| 充電器 | 輸入:AC220V~240V / 充電電流:3A / 接口:直插式 | 附件 | 電池充電器、ULB-1超聲傳感器×3 |
| DEMO開發板 | RHF407開發板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,ADC×8,DAC×2,PWM×8,LED×2,按鍵×2, 獨立I/O×24,可復用I/O×29,TF卡接口×1,RTC后備電池座,可復用TFT LCD接口×1) | ||
| 機身形式 | 鈑金組合成型 | ||
| 驅動輪 | HSL-10橡膠輪 | ||
| 驅動方式 | 四輪獨立驅動 | ||
| 車身最小離地間隙 | 30mm | ||
| 額定負載能力 | 15kg | ||
| 電機額定功率 | 17W | ||
| 電機數量 | 4 | ||
| 最大移動速度 | 0.65m/s | ||
| 最小轉彎半徑 | 0m | ||
| 典型續航時間 | 約8h(負載5kg,運行速度0.5m/s,運行率70%) | ||
| 車載電源輸出 | 5V@2.5A×2路 /電池電壓(9.6~12.6V)@>5A | ||
| 電池 | 12V/10.4Ah鋰離子電池 | ||
| 充電器 | 輸入:AC220V~240V / 充電電流:3A / 接口:直插式 | ||
| 外形尺寸 | 301.6×308×112 | ||
| 驅動輪直徑 | 101.6mm | ||
| 懸掛形式 | 無懸掛 | ||
| 整機重量 | 5.6kg | ||
| 電機類型 | 空心杯直流伺服電機 | ||
| 電機編碼器 | 12線/轉,A、B相輸出 | ||
| 電機驅動 | 伺服驅動器,CAN總線、RS232通信接口 | ||
| 最大自轉速度 | 160°/s | ||
| 適應的地形 | 室內、室外普通路面及泥濘路面 | ||
| 待機時間 | >30h | ||
| 電源保險管預設規格 | 5×20/10A | ||
| 電池快速更換 | 支持 | ||
| 附件 | 電池充電器、ULB-1超聲傳感器×3 | ||
| DEMO開發板 | RHF407開發板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,ADC×8,DAC×2,PWM×8,LED×2,按鍵×2, 獨立I/O×24,可復用I/O×29,TF卡接口×1,RTC后備電池座,可復用TFT LCD接口×1) | ||
典型部件
-

HSL-10橡膠輪
-

RHF407開發板
-

ULB-1超聲測距傳感器
-

IMDR4E伺服驅動器
-

Faulhaber3242空心杯直流伺服電機
典型研究與應用領域
- 模式識別技術研究
- 電子工程實驗
- 搬運與倉儲應用
- 路徑規劃技術研究
- 機械工程實驗
- 監控與偵查應用
- 自動駕駛技術研究
- 嵌入式系統開發與實驗
- 機器人競賽
- 傳感器技術研究
- 圖像處理技術研究
- 地圖繪制應用
- 人工智能技術研究
- 多機器人合作技術研究
- 柔性制造系統應用
可選附件
- HMC-01遙控手柄
- LPC-16巡線傳感器
- ULB-1超聲測距傳感器
- 激光雷達
- GPS定位器
- Kinect體感傳感器